Chapter 11: Exceptional Groups
The Geometry of $G_2$
What are the symmetries of the division algebras $\RR$, $\CC$, $\HH$, and $\OO$? Let's start with $\HH$. The labeling $i$, $j$, $k$ is arbitrary; any right-handed, orthonormal basis of $\Im\OO$ could be used instead of $i$, $j$, $k$. This freedom represents a geometric symmetry, corresponding to the rigid rotations on the unit sphere in the 3-dimensional vector space of imaginary quaternions. But this symmetry is also algebraic, since the choice of handedness ensures that the multiplication table is preserved.
More formally, we define the isometry group $\SO(\Im\KK)$ to be the group of orientation- and norm- preserving transformations on the (normed) vector space $\Im\KK$ of imaginary elements of $\KK$, and we define the automorphism group $\Aut\KK$ to be the transformations $\phi$ on $\KK$ that preserve the multiplication table, that is, that satisfy \begin{equation} \phi(pq) = \phi(p) \,\phi(q) \end{equation} Any automorphism must preserve the identity element, that is, \begin{equation} \phi(1) = 1 \end{equation} so that $\Aut(\KK)$ acts only on $\Im\KK$. Over the quaternions, we have \begin{equation} \Aut(\HH) = \SO(\Im\HH) = \SO(3) \end{equation}
What are the symmetries of $\CC$? The imaginary complex numbers $\Im\CC$ form a 1-dimensional vector space, whose only symmetry is the orientation-reversing transformation $i\longmapsto-i$. This transformation is in fact an automorphism, but such discrete transformations do not generate 1-parameter families. And $\RR$ contain no imaginary units; its isometry and automorphism groups are trivial.
What about the octonions? There are seven basis imaginary units, so the isometry group is clearly \begin{equation} \SO(\Im\OO) = \SO(7) \end{equation} However, a simple counting argument shows that not all of the 21 elements of $\SO(7)$ can be automorphisms.
Any automorphism of $\OO$ must take $i$ somewhere. Since the imaginary units form a 6-sphere in $\Im\OO$, there are six degrees of freedom in where $i$ can go. Next, we place $j$. Where can it go? Somewhere on the 6-sphere, but orthogonal to $i$, corresponding to an additional five degrees of freedom. However, once $i$ and $j$ have been placed, we have no choice in where we put $k$, since $\phi(k)=\phi(i)\phi(j)$. Having placed $i$, $j$, $k$, we can put $\ell$ anwhere on the 6-sphere orthogonal to each of them, corresponding to $6-3=3$ additional degrees of freedom. The remaining basis units, $i\ell$, $j\ell$, $k\ell$, are again constrained by the automorphism property. Thus, there are $6+5+3=14$ choices we can make, and we expect \begin{equation} |\Aut(\OO)| = 14 \end{equation}
The automorphism group $\Aut\OO$ is the smallest of the exceptional Lie groups, and is classified as $G_2$, that is \begin{equation} G_2 = \Aut(\OO) \end{equation} But what are the 14 independent automorphisms of $\OO$?
Consider a rotation in the $ij$-plane. We know this transformation is an automorphism of $\HH$, so the product of the rotated units is still $k$. 1) But we have also affected products such as $i(i\ell)$ — unless we also rotate by an equal amount in the $(i\ell)(j\ell)$-plane. Direct calculation shows that this is sufficient; the transformation \begin{align} i &\longmapsto i\cos\alpha-j\sin\alpha \nonumber\\ j &\longmapsto i\sin\alpha+j\cos\alpha \nonumber\\ k &\longmapsto k \nonumber\\ k\ell &\longmapsto k\ell \nonumber\\ j\ell &\longmapsto i\ell\sin\alpha+j\ell\cos\alpha \nonumber\\ i\ell &\longmapsto i\ell\cos\alpha-j\ell\sin\alpha \nonumber\\ \ell &\longmapsto \ell \end{align} is an automorphism of $\OO$ for each value of $\alpha$.
How many such (families of) automorphisms are there? We rotated two planes in opposite directions, but there is a relationship between the planes. We say that the $ij$-plane “points” to $ij=k$. Similarly, the $(j\ell)(i\ell)$ plane also points to $k$. Thus, a better description of our automorphism is that it involves equal but opposite rotations in two planes that point to the same unit. There are seven units that can be pointed to, and in each case three choices of a pair of planes pointing to that unit. We therefore have 21 automorphisms of this form, but not all of them are independent.
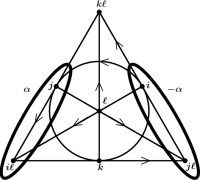
Figure 1: A $G_2$ transformation that “points” to $k\ell$.
Which planes point to $k$? Which basis units multiply to $k$? There are three lines intersecting in each point in the multiplication table of $\OO$, represented in terms of the 7-point projective plane, so there are three such pairs of units, in this case \begin{equation} k = ij = (j\ell)(i\ell) = \ell(k\ell) \end{equation} An element of $G_2$ “pointing” to $k\ell$ is illustrated in Figure 1. However, combining any two pairs of rotations (by the same angle) yields the third pair, so only two of these three automorphisms are independent. Thus, we have precisely $7\times2=14$ independent automorphisms, which generate $G_2$. But which 14 automorphisms should we pick to be our basis?
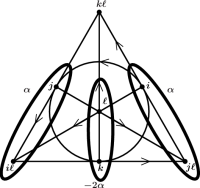
Figure 2: A second $G_2$ transformation that “points” to $k\ell$.
We adopt the following strategy. Choose one octonion to be special, say $\ell$. At each of the six points other than $\ell$ in the projective plane, three lines intersect. One of these lines contains $\ell$, and the other two do not. Thus, there is a preferred pair of planes pointing to each unit other than $\ell$. For example, our construction above started by rotating the $ij$- and $(j\ell)(i\ell)$-planes by equal and opposite amounts — and leaving the $\ell(k\ell)$-plane alone. Call this automorphism $A_k$. Rather than picking one of the other two automorphisms pointing to $k$ as special, take their difference, and call it $G_k$. With a particular choice of orientation, $G_k$ will rotate the $ij$- and $(j\ell)(i\ell)$-planes by the same amount — and will rotate the $\ell(k\ell)$-plane by twice as much in the opposite direction. Repeat this construction for automorphisms pointing to the other units, and make an arbitrary choice of which pair of planes to use when constructing $A_\ell$. The 14 transformations $\{A_m,G_m\}$ generate $G_2$. The $G_2$ elements $A_{k\ell}$ and $G_{k\ell}$ are illustrated in Figures 1 and 2, respectively.
We are not quite done. There is a third independent rotation, call it $S_m$, pointing to each unit $m$, namely the transformation that rotates all three planes in the same direction. For example, $S_k$ rotates the $ij$-, $(j\ell)(i\ell)$-, and $\ell(k\ell)$-planes by equal amounts in the same direction. The rotations $S_m$ are of course not in $G_2$, but they are precisely the extra seven rotations needed to extend $G_2$ to $\SO(7)$.
Having treated $\ell$ as special, it is of interest to know what subgroups of $G_2$ and $\SO(7)$ leave $\ell$ invariant. We constructed the $A_m$ precisely so that they would fix $\ell$, so the subgroup of $G_2$ that fixes $\ell$ is generated by the seven transformations $A_m$ together with $G_\ell$ — any rotation in planes pointing to $\ell$ must fix $\ell$. These eight transformations turn out to generate a copy of $\SU(3)$. The subgroup of $\SO(7)$ that fixes one of the units is of course $\SO(6)$, which must contain this $\SU(3)$. Since $|\SU(3)|=8$ and $|\SO(6)|=15$, we are missing seven independent elements of $\SO(6)$. Which ones? The rotations that rotate two planes pointing to $m$ in the same direction, leaving the third alone. For example, pointing to $k$, the missing element of $\SO(6)$ can be chosen to be the rotation rotating the $ij$- and $(j\ell)(i\ell)$- planes by the same amount in the same direction.
1)
This statement is equivalent to the more familiar statement that the cross
product of any two (oriented) unit vectors in the $xy$-plane gives
the unit vector in the $z$-direction.